.png?v=1663655544 "www.rchobby-jp.com")




*M8N GPSは生産終了されたので、2023年11月により、GPSはM9N GPSに変更させていただきます。
Holybro Pixhawk® 6Cは、成功したPixhawk®フライトコントローラーファミリーの最新バージョンであり、Pixhawk® FMUv6Cオープンスタンダードおよびコネクタスタンダードに基づいています。PX4 Autopilot®がプリインストールされています。
Pixhawk® 6C内部には、STMicroelectronics®製のSTM32H743が搭載されており、Bosch®&InvenSense®のセンサ技術と組み合わされています。これにより、どんな自律型車両の制御にも柔軟性と信頼性を提供し、学術および商業アプリケーションの両方に適しています。
Pixhawk® 6CのH7マイクロコントローラーには、最大480 MHzで動作するArm® Cortex®-M7コアが搭載されており、2MBのフラッシュメモリと1MBのRAMを持っています。最新の処理能力のおかげで、開発者は開発作業をより生産的かつ効率的に行うことができます。複雑なアルゴリズムやモデルを扱うことが可能となります。
FMUv6Cオープンスタンダードには、高性能で低ノイズのIMUが搭載されており、IMUの冗長性を確保しながらコスト効果の高い設計となっています。高周波振動を取り除き、ノイズを低減するための振動遮断システムがあり、正確な測定を保証します。これにより、車両はより優れた飛行性能を発揮することができます。
Pixhawk® 6Cは、企業の研究所、スタートアップ企業、学術機関(研究者、教授、学生)および商業アプリケーションの開発者に最適です。
特徴:
最高クロック速度480 MHzの高性能H7プロセッサー
低プロファイル形状の新しいコスト効果の高いデザイン
Bosch®&InvenSense®の冗長な慣性計測装置(IMU)
高周波振動を取り除き、ノイズを低減するための新しく設計された統合振動遮断システムにより、正確な測定を保証
IMUはオンボードの加熱抵抗器によって温度制御されており、IMUの最適な作動温度を実現
仕様:
プロセッサーとセンサー
FMUプロセッサ: STM32H743
32 ビット Arm® Cortex®-M7、480MHz、2MB メモリ、1MB SRAM
IOプロセッサ: STM32F103
32 ビット Arm® Cortex®-M3、72MHz、64KB SRAM
オンボードセンサー
アクセル/ジャイロ:ICM-42688-P
アクセル/ジャイロ:BMI055
雑誌: IST8310
気圧計:MS5611
定格電圧:
最大入力電圧:6V
USB電源入力:4.75〜5.25V
サーボレール入力:0〜36V
定格電流:
Telem1最大出力電流制限値:1.5A
その他のポートの合計出力電流制限値:1.5A
機械的データ
寸法: 84.8 * 44 * 12.4 mm
重量: 59.3g
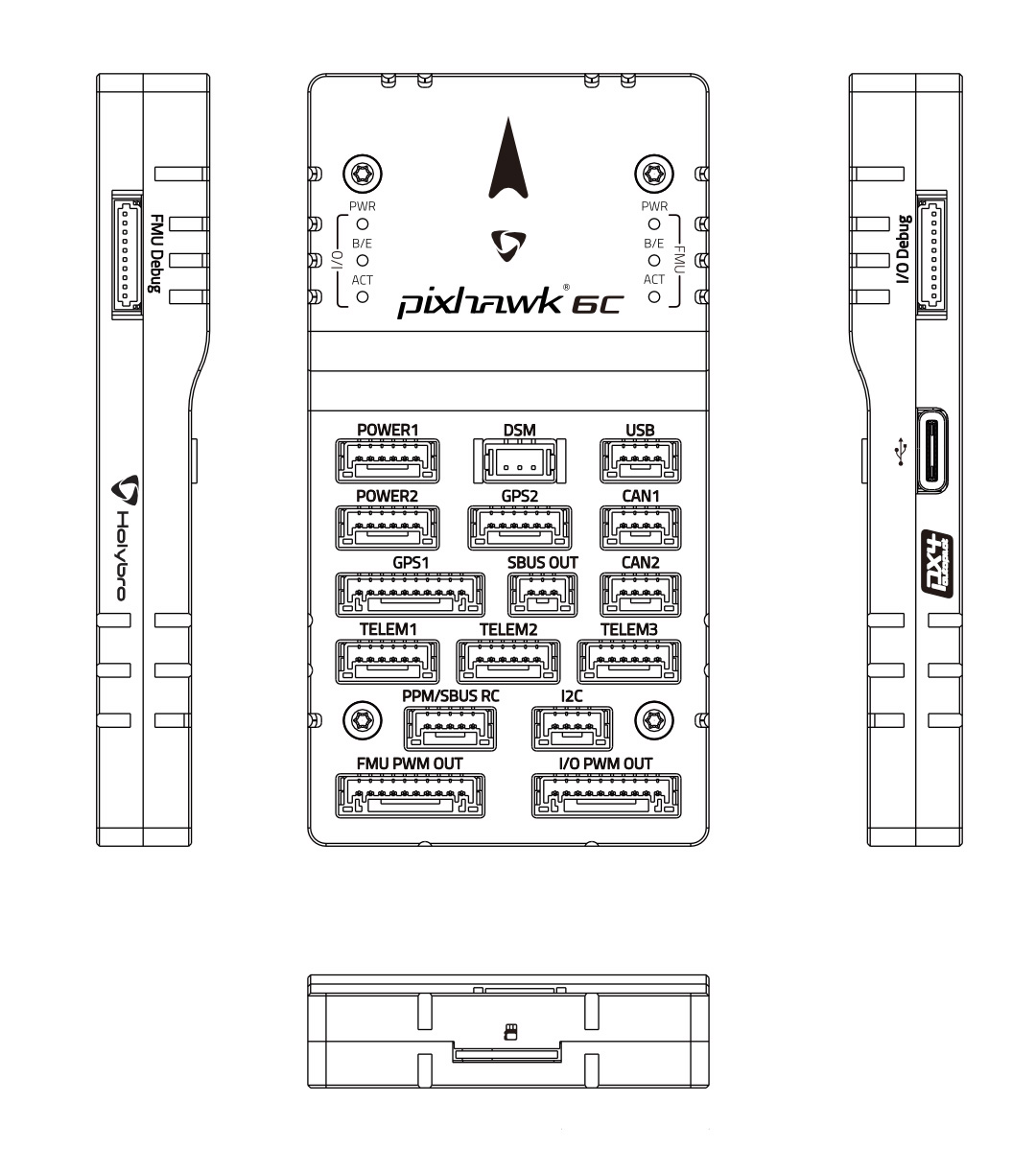
インターフェース
16 - PWM サーボ出力 (IO から 8、FMU から 8)
3 つの汎用シリアル ポート
Telem1 - フルフロー制御、個別の 1.5A 電流制限
Telem2 - 完全なフロー制御
テレム3
2つのGPSポート
GPS1 - フル GPS ポート (GPS プラス安全スイッチ)
GPS2 - 基本 GPS ポート
1 I2Cポート
センサーモジュールにある専用の I2C キャリブレーション EEPROM をサポート
2つのCANバス
CAN バスには個別のサイレント コントロールまたは ESC RX-MUX コントロールがあります
2 デバッグポート
FMUのデバッグ
I/Oデバッグ
Spektrum / DSM および S.BUS、CPPM、アナログ / PWM RSSI 用の専用 R/C 入力
専用のS.BUS出力
2 電源入力ポート (アナログ)
パッケージには次のものが含まれています:
1 x Pixhawk 6C フライトコントローラーモジュール
1 x PM02 V3 12S パワーモジュール / PM07 12S パワーモジュール(オプション)
1 x ケーブルセット
1 x M8N GPS(オプション)
いくつかの情報が必要になるかもしれません:
サポートされるファームウェア
Pixhawk 6C には PX4 マスタービルドが搭載されています。
PX4
Pixhawk 6C のサポートは PX4 マスターに追加されました。
安定版リリース v1.13.0 では Pixhawk 6C はサポートされていません。近日中にリリースされる安定版 v1.13.1 に追加されます。
QGroundControl
現時点ではデイリーの QGC ビルドを使用する必要があります。
Ardupilot
現時点では「最新」のファームウェアを使用する必要があります。これは 4.2.3 の安定版リリースの一部となります。
Ardupilot ファームウェアのダウンロード
Copter: https://firmware.ardupilot.org/Copter/latest/Pixhawk6C/
Plane: https://firmware.ardupilot.org/Plane/latest/Pixhawk6C/
